
(455502) 2003 UZ413: A 20.8 Magnitude Plutino in TESS data
I haven't found a suitable 21st magnitude target yet. Most objects turn out to be either too dim or (more significantly) too fast. (455502) 2003 UZ413 is a TNO in the Plutino category. It's slightly dimmer than Sedna but it moves faster across a full frame image than Sedna. Both of these characteristics make it an incrementally tougher challenge for detection. Dimmer objects are tougher for obvious reasons, but faster objects are starting to be the real limiter for this process now. If you're integrating images over 10+ hours it really matters how long an object stays in one pixel over that time. You can't productively coadd multiple images if the object isn't in the same place for the duration of the integration.
Having said that, this wasn't a terribly difficult detection. It basically appeared immediately when I processed the images using the same process I used for Sedna. I tweaked a couple of parameters to pull out one or two more detections, but it was still revealed from the start without much work. I made one improvement to my process that I'll mention later, but otherwise this will be a familiar outline and this writeup will be pretty brief.
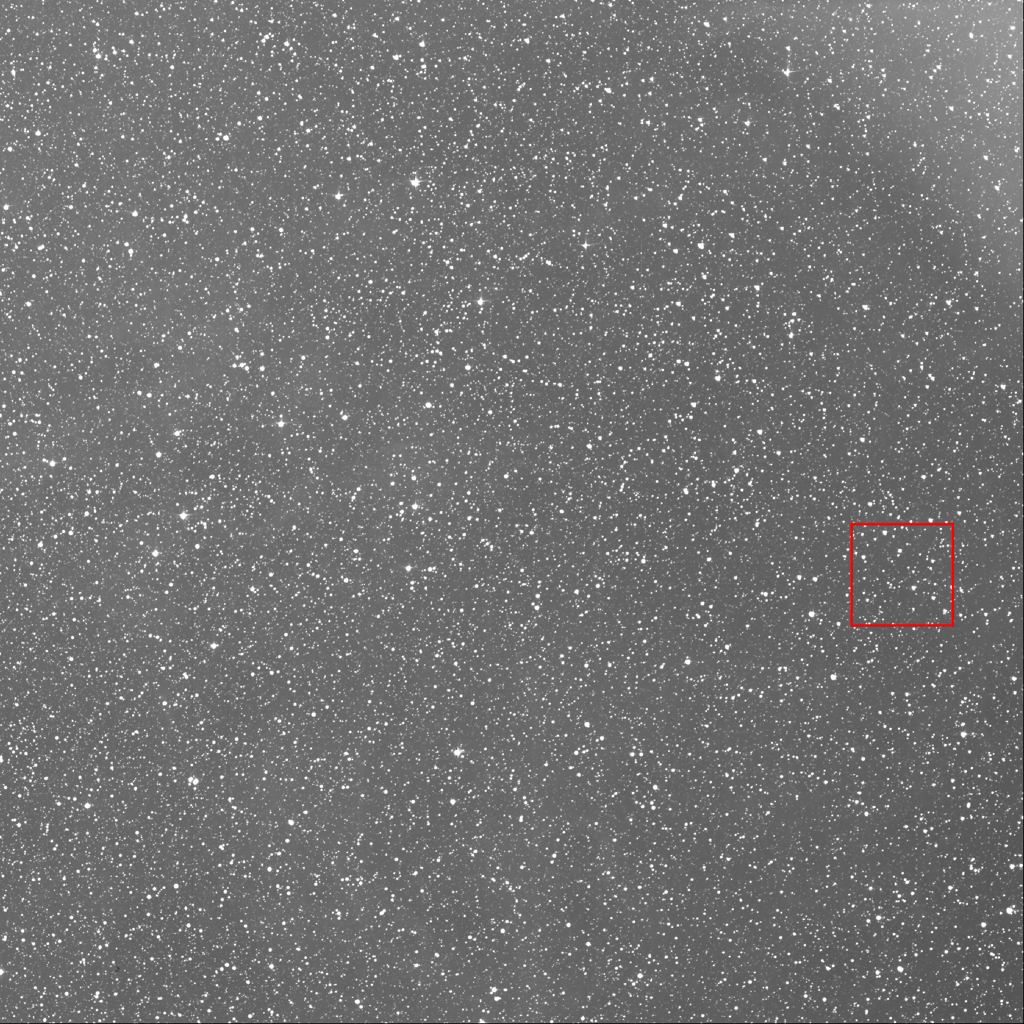
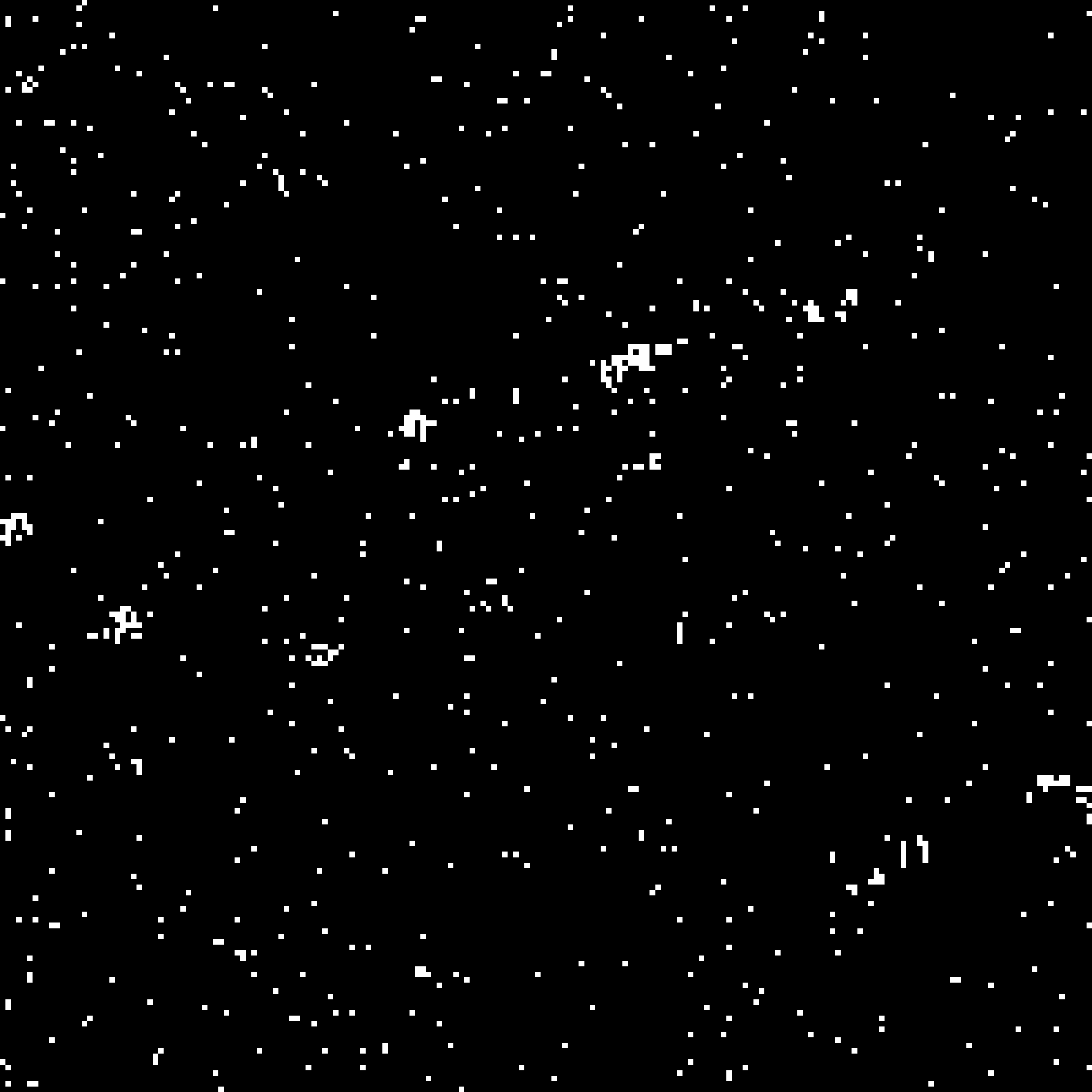
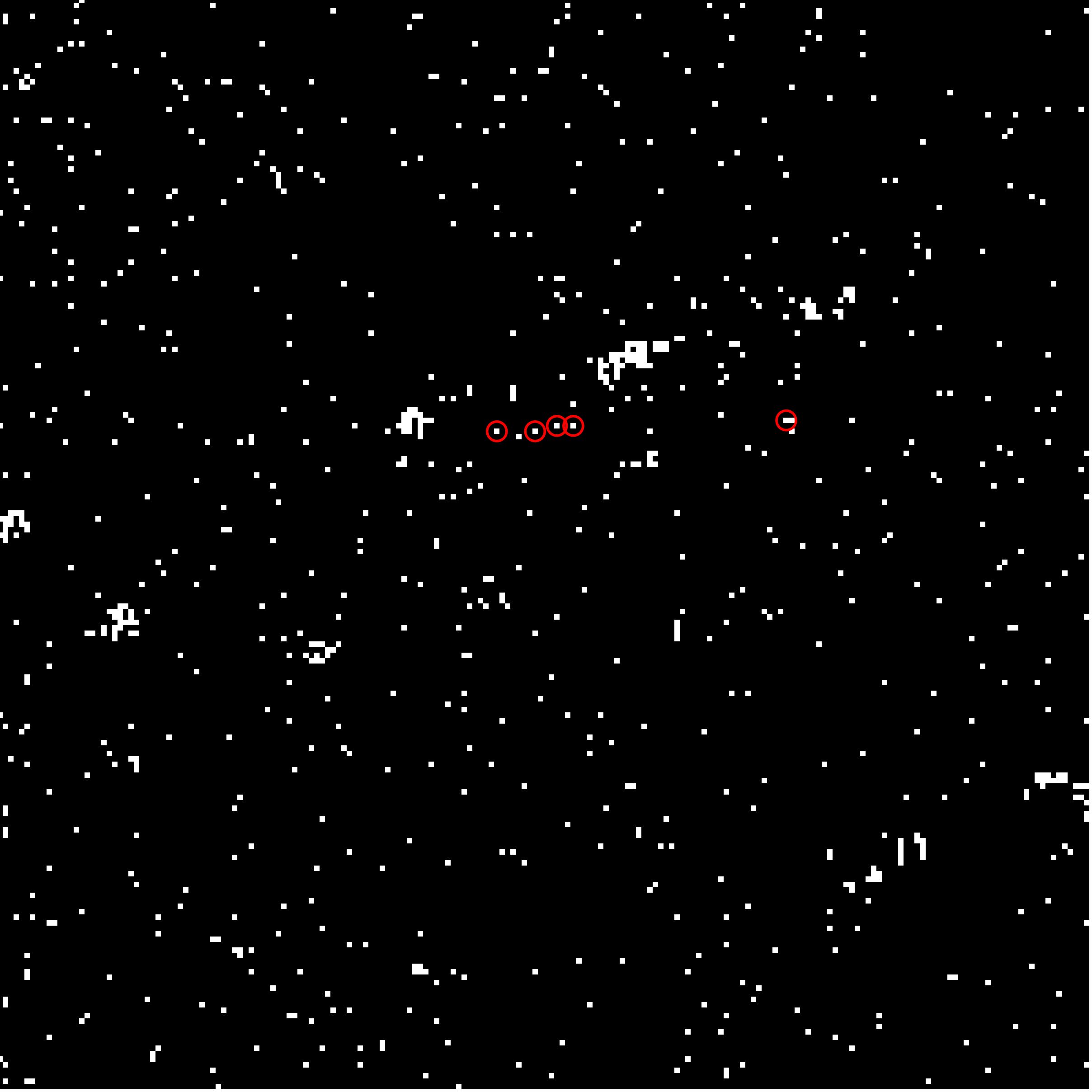
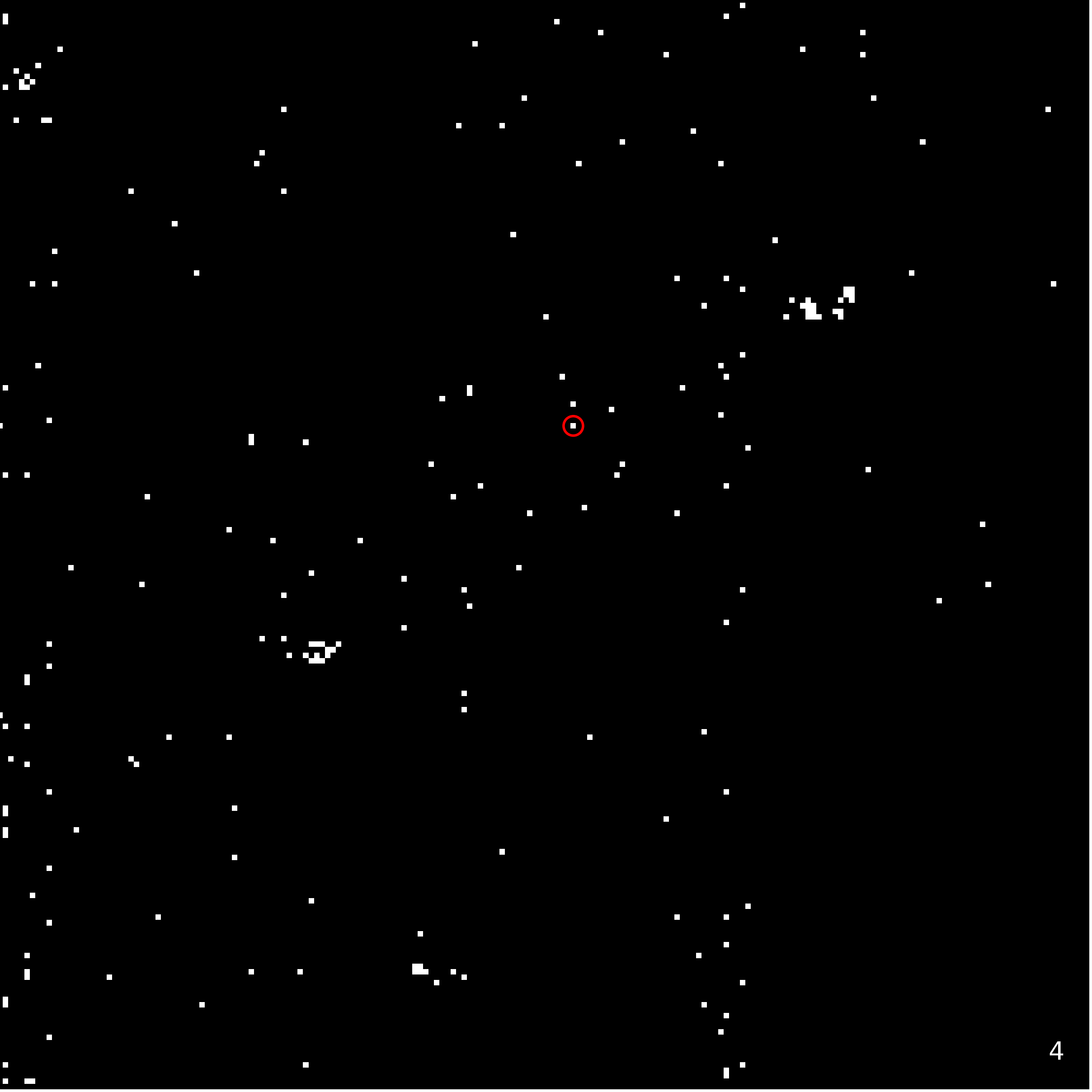
1. This is a TESS sector 5; camera 1; CCD 4 full frame image with the region of interest that we'll be studying containing 2003 UZ413 outlined in red.
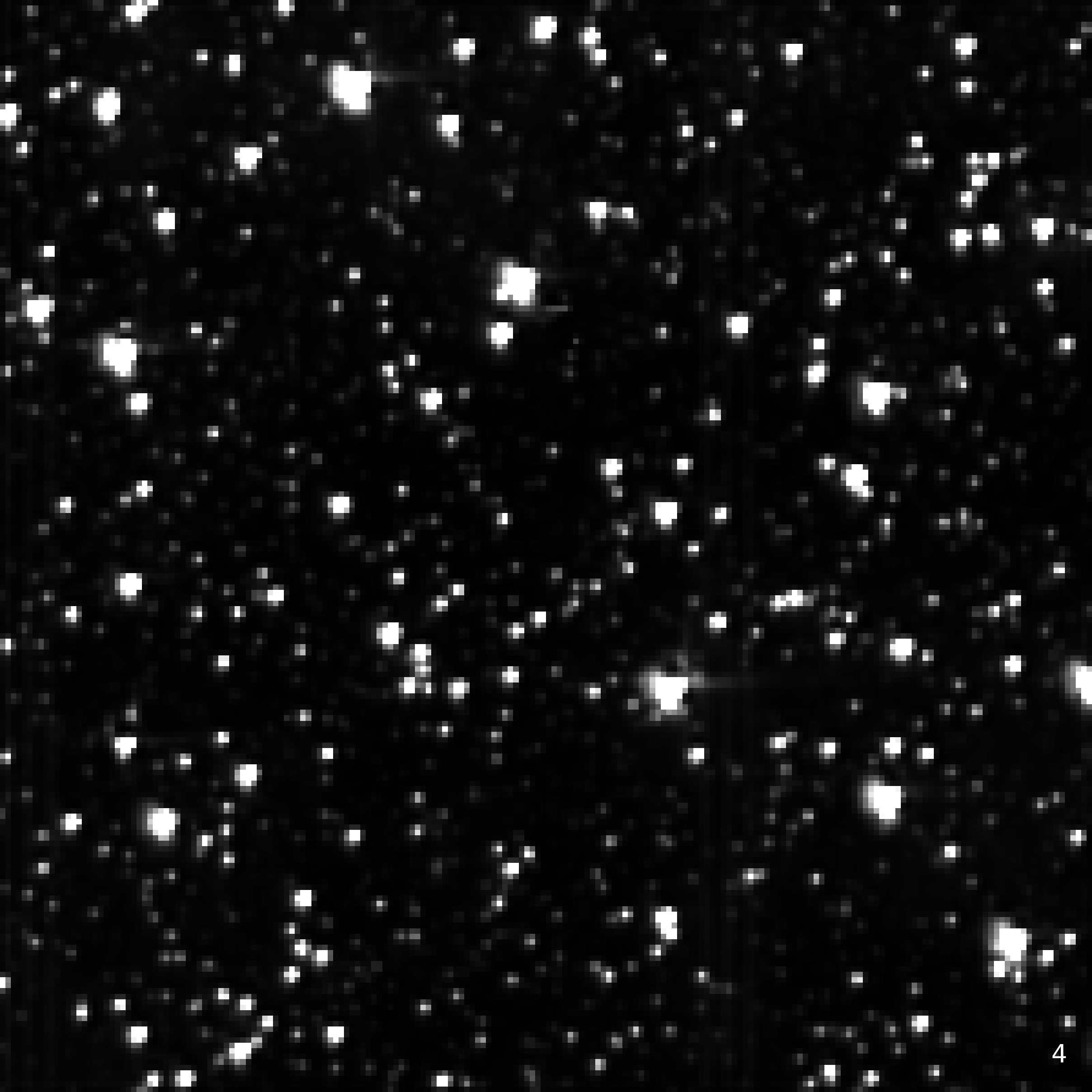
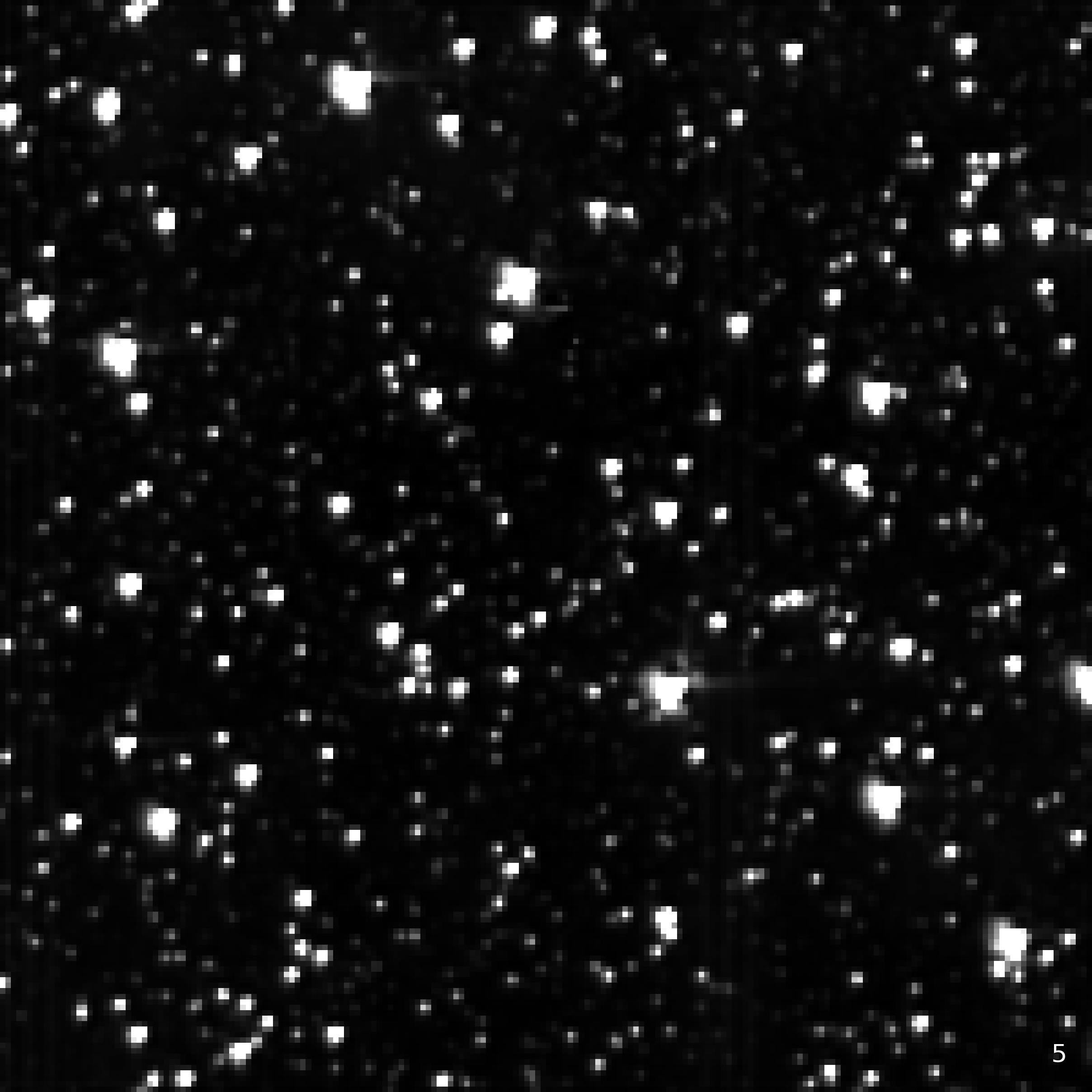

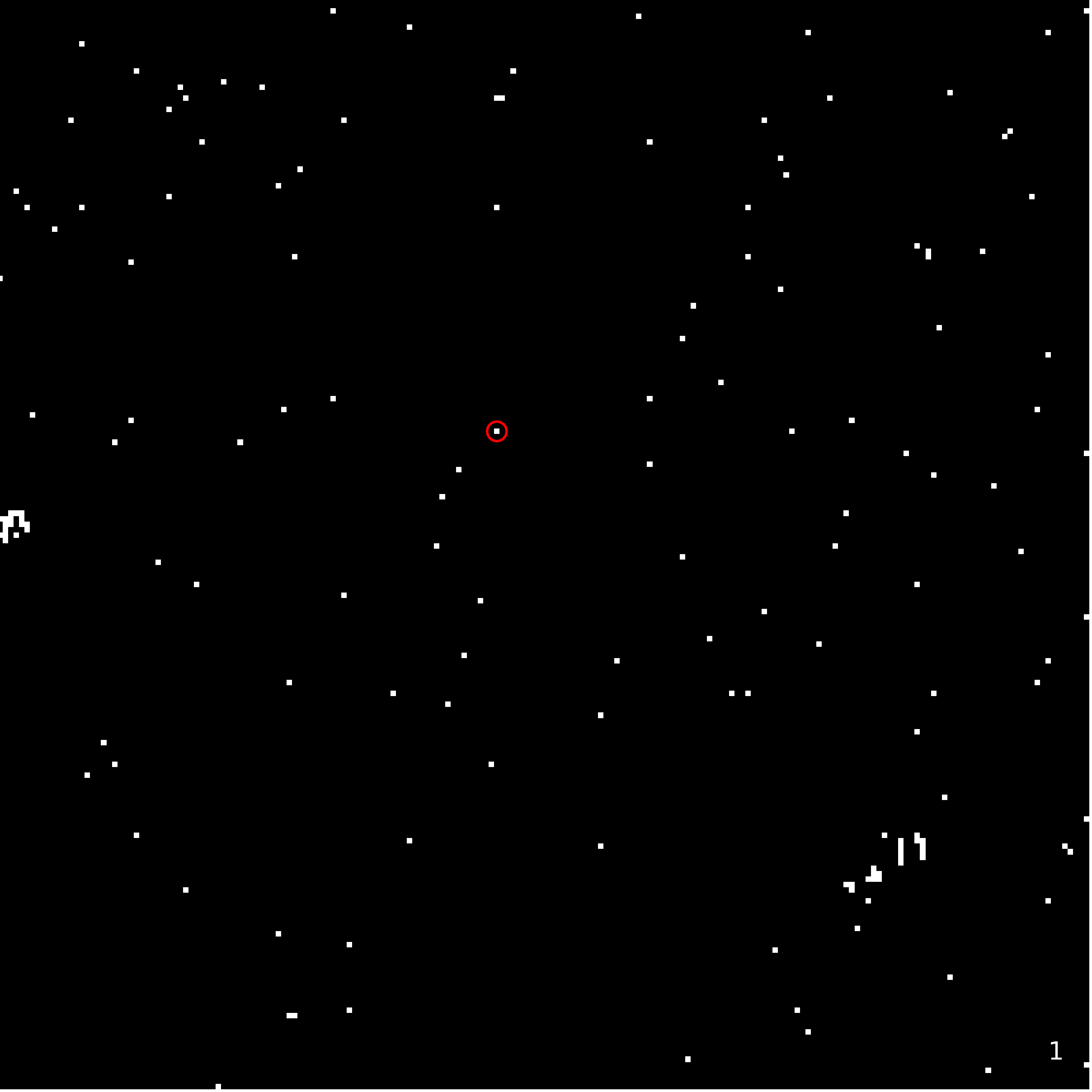
2. These are the six processed frames that register 2003 UZ413 detections or potential detections upon analysis. Frame dates are: 2018-11-22, 2018-11-24, 2018-11-25, 2018-11-26, 2018-11-30 and 2018-12-07. The data comes from the same FFIs that I used for Sedna.
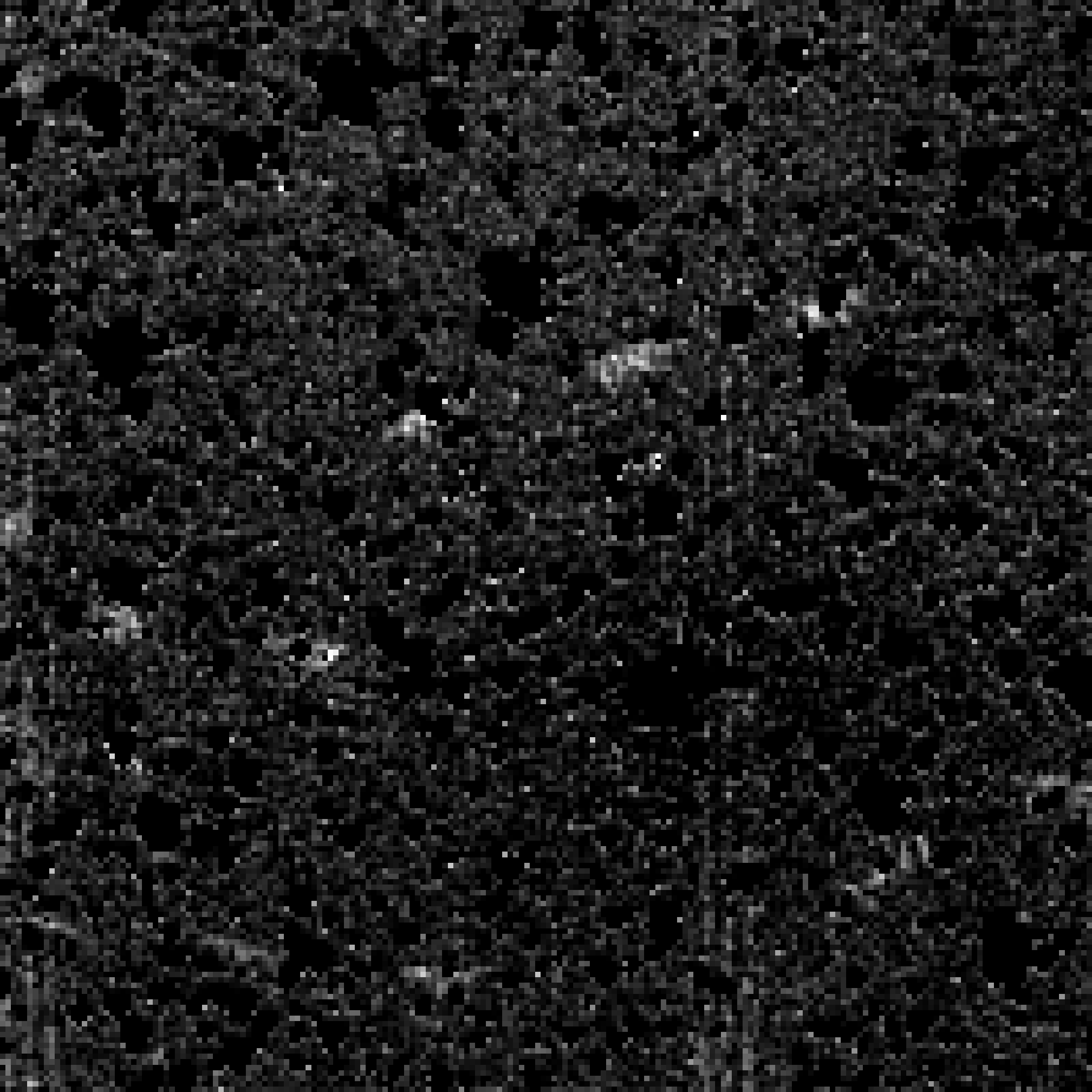





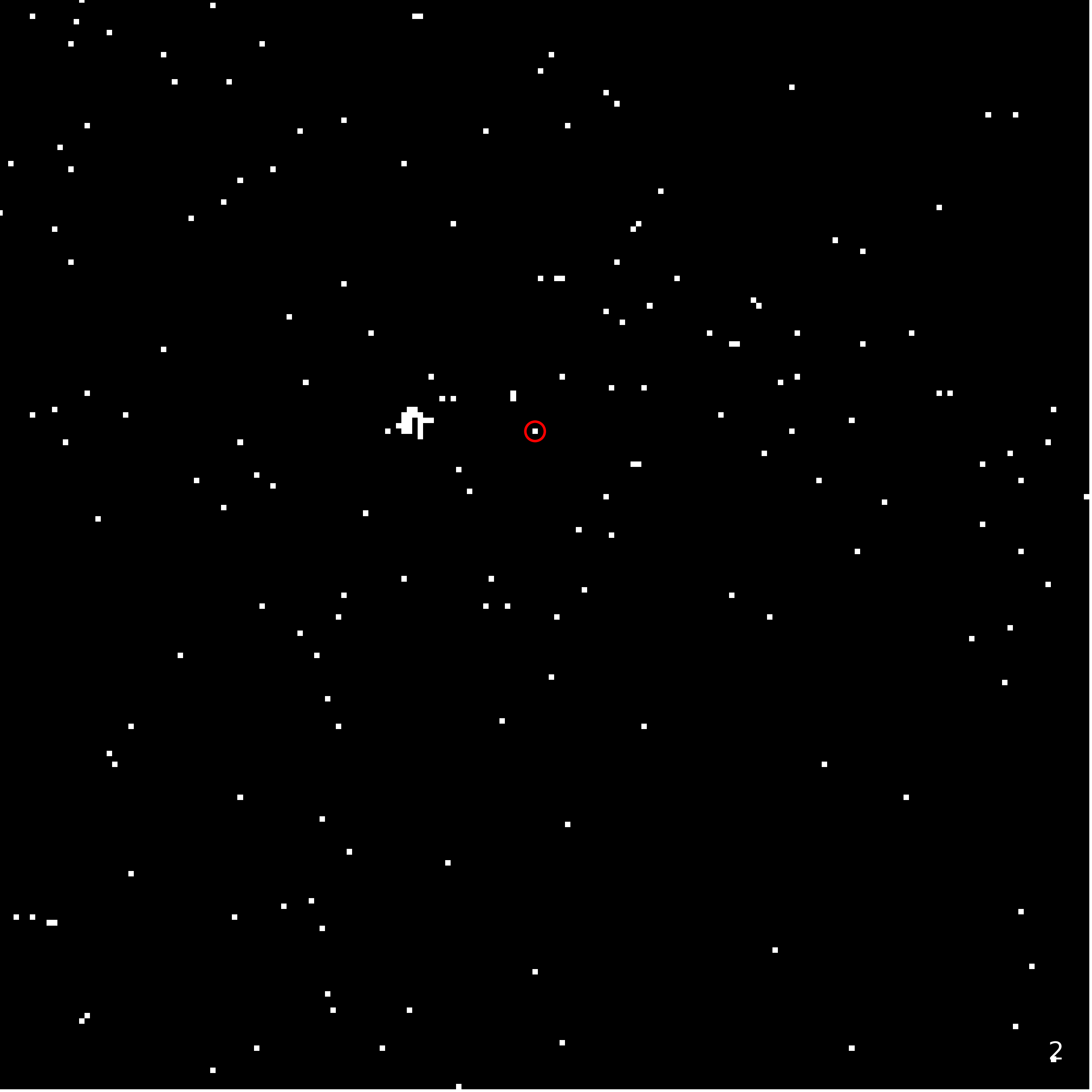
3. These frames are the image set 2 frames with a static sky template subtracted. You can see some large relatively fast objects in motion, but those are not what we're interested in here. 2003 UZ413 is much smaller and considerably slower. You can't see it in these raw difference images.



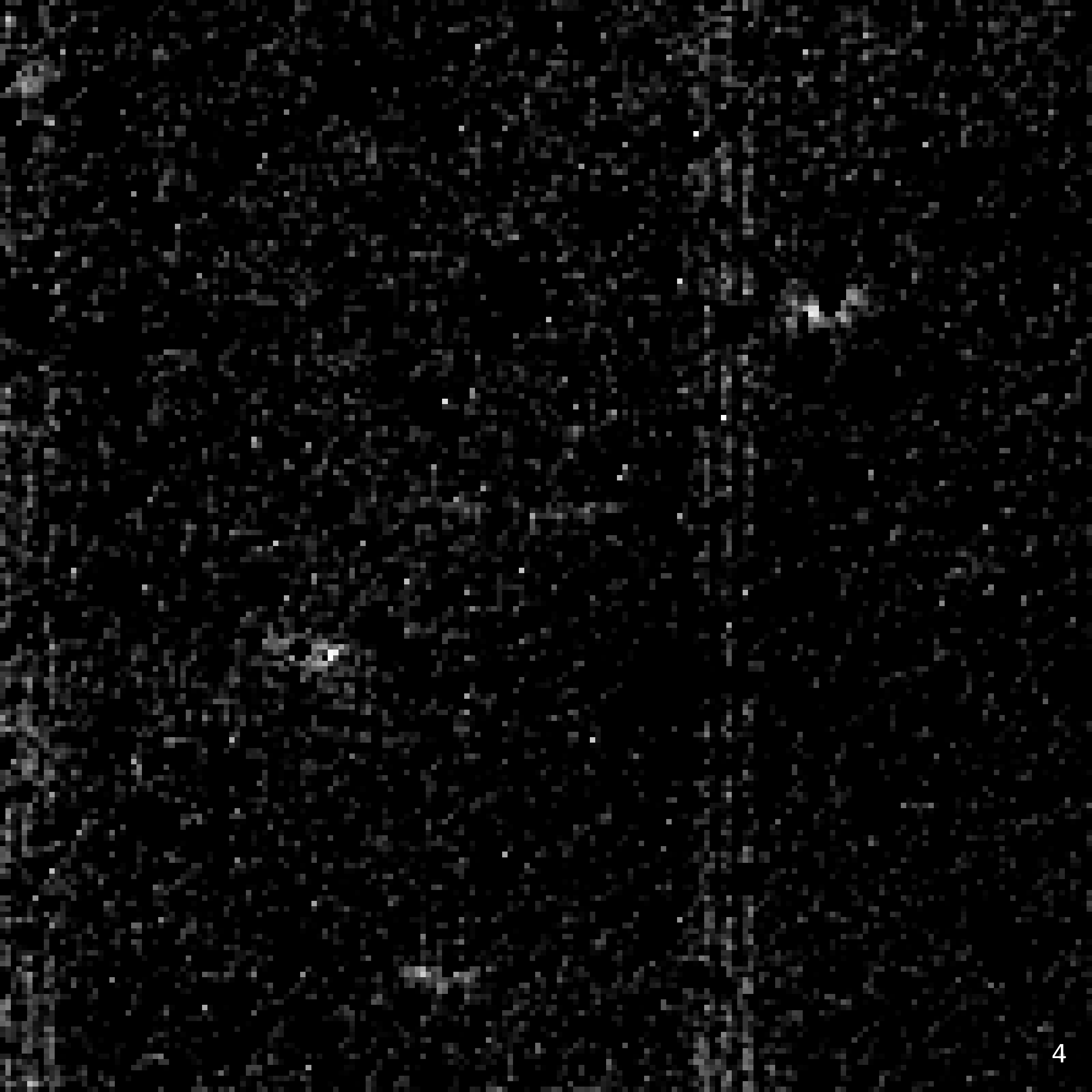
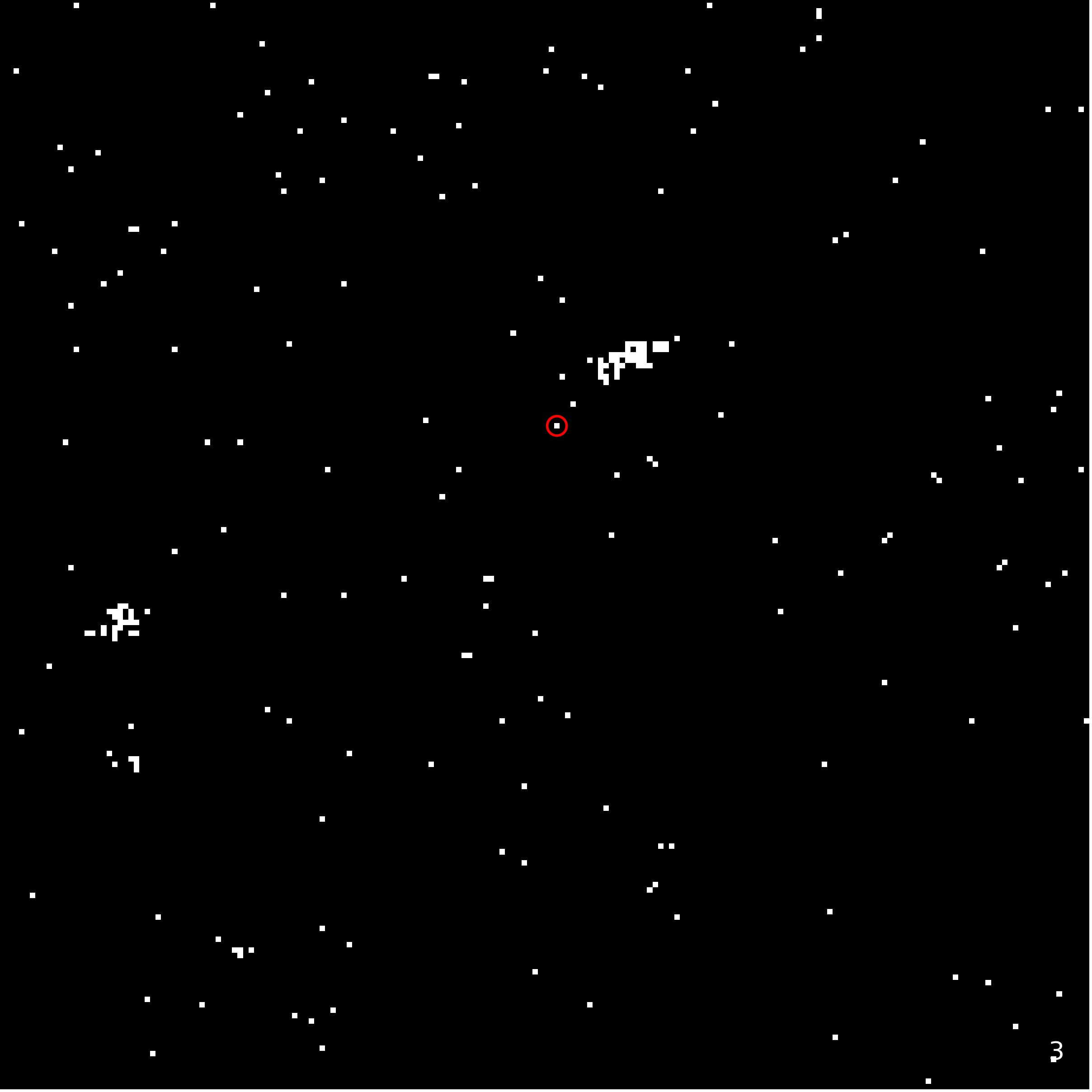
4. Here the frames of image set 3 have been thresholded at 3σ to reduce noise, but it's still not apparent which of these dots connect to one another to form a sequential track representing a real physical orbit.
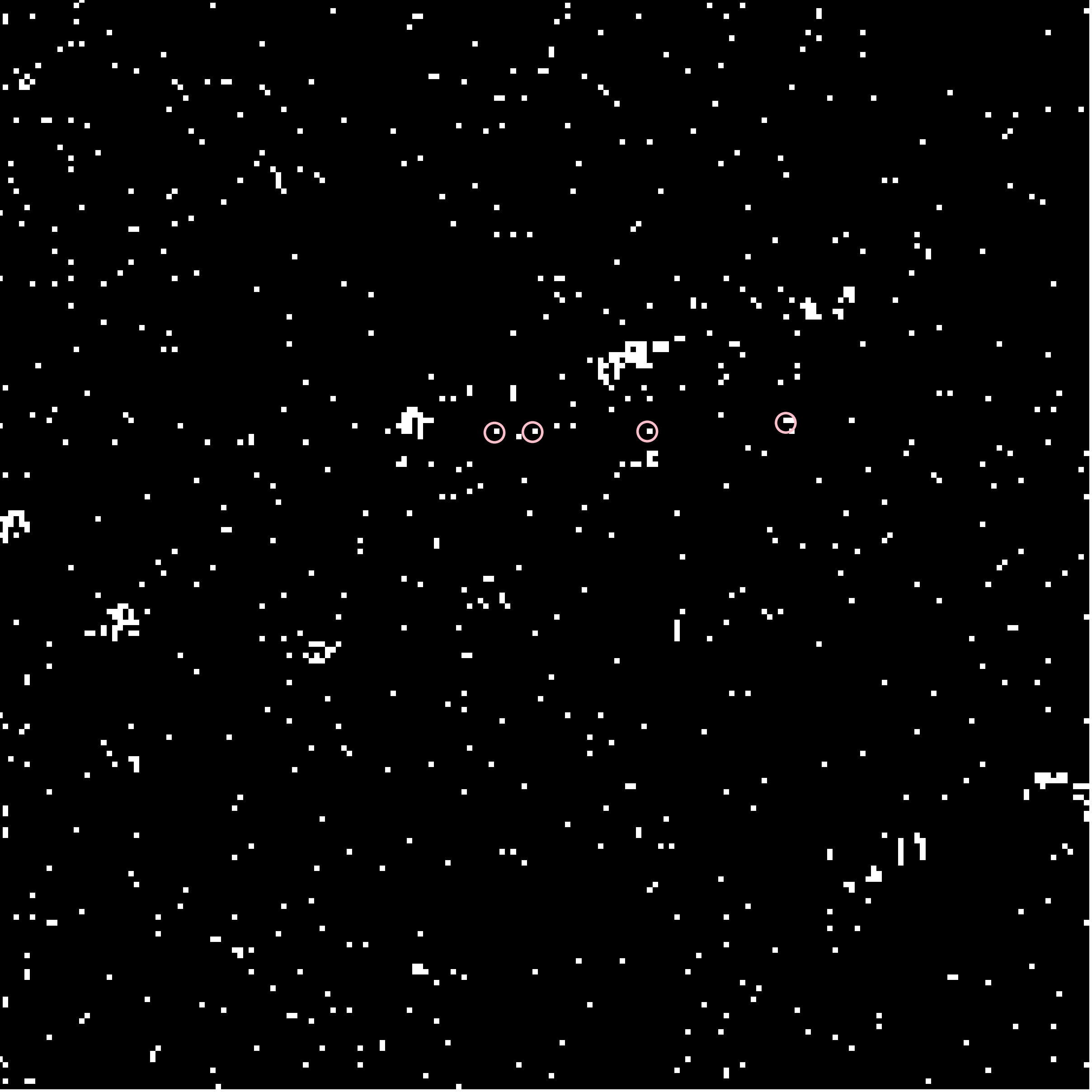
5. In these frames I've linked detections with pixel velocity vector clustering. In short, pixels that are moving at the same rate with respect to one another are selected. Since I know what the expected pixel per day motion of 2003 UZ413 is, I constrained the velocity range of my search to limit the number of linked detection candidates to 2003 UZ413 alone. Click and hold the image set to see a composite view.


6. Finally, here are the four detections that match JPL's Horizons position data for 2003 UZ413 to better than 0.5 pixel accuracy. Note that linking (image set 5) and matching (this image set) have highlighted overlapping but not identical detections. I'll talk about that more below. Click and hold the image set to see a composite view.
{kind=link}
Image set notes:
This isn't really a technical overview. Because the processing is virtually identical, please see Sedna's technical details section and the high level process notes for a more complete description.
Image 1: This image highlights the region of interest we're investigating.
Image set 2: These are the 6 cropped and processed frames that yield detections in the end. One interesting thing to note is the small amount of jitter in the frames you see between frame 6 and frame 1. This reminds me that I should consider incorporating image registration in my process.
Image set 3: These are the difference images calculated as image set 2 frames with a static sky template removed from them. As with Sedna I'm now using a variable static sky template to create the difference images. New for this study I'm also excluding the frame I'm differencing from the stack of images that I'm building the static sky template from.
Image set 4: Image set 3 frames with a 3σ threshold applied.
Image set 5: Image set 4 frames with object linking via pixel velocity vector clustering circled.
Image set 6: These frames are the same as image set 4 frames but with JPL Horizons position matches for 2003 UZ413 circled. Note that image set 5 and image set 6 have overlapping but not identical circled detections. This is somewhat interesting. I would not be surprised if the two detections that image set 5 links that are not matched to 2003 UZ413 in image set 6 are actually real in the end. TESS' 'fat pixels' plus PSF deconvolution may have binned light in an adjacent pixel that fell outside of my 0.5 pixel matching error tolerance. I'm most curious about how this kind of thing might affect orbit determination from linked detections.
Other process notes:
- Don't use the frame being differenced in the template stack: I probably should have thought of this long ago, but better late than never. In bootstrapping the static sky template for image differencing I've always considered all frames and then applied some statistical operation on them (e.g. median, average, trimmed max). During this study I realized that I should remove the frame I'm differencing from the set of frames that I'm building the static sky template from. If you include the frame you're differencing (which you're trying to pull a detection out of) you will always have a small bias pushing in the wrong direction in the pixel(s) where the detection would exist.
-
Apparent motion limiting detection capability: This study uses 20 TESS FFIs which is 10 hours of exposure and 8 hours of cosmic ray mitigated effective exposure. By my calculations 2003 UZ413 moves about 3.5 pixels/day in a TESS FFI. If you median integrate a full day's worth of data you're likely to completely remove an object moving that fast. With 10 hours you're only going to get motion across ~1.5 pixels which is good enough for detection. But you can see the fundamental problem now. Dimmer objects require more integration time, but more integration times ends up spreading the signal across too many pixels to register detection. I will be calculating pixel/day motion for all known objects I'm trying to find in the future. Distant enough to be slow but not so distant as to be too dim is the sweet spot. Sedna is really quite perfect because of this.
Ideas & Todos:
- Image registration: This is just a reminder to myself. That jitter that you can see in image set 2 might be subtle frame misalignment. I should eventually implement a tool that registers frames to a preliminary static sky template.
- Orbit Determination: This is what I really want to focus on next, but it's sort of a full on project by itself. There are some tools out there that seem to do this (OpenOrb, OrbFit, Find_Orb), but they all seem to have a pretty steep learning curve. It doesn't seem as easy as specifying an observation origin, 3 observation times and 3 RA/DEC pairs. This will require some research.
Discussion:
While 2003 UZ413 is the dimmest object I've detected to date, it really wasn't that difficult to find and it didn't require substantial improvement to my detection process. But I'm glad I took the time to document it still. The real question is what comes next. I'm sure I will continue to search for dim and distant objects when I find suitable targets that I think are within the realm of detection. I do want to find a 21st magnitude object eventually, but I'm probably not going to make that my first priority. Instead I want to take my linking algorithm and use orbit determination as a filter on candidate detections. My first thought is to use my Sedna detections as a test for this process. If I can broaden my linking search for Sedna to generate a few false candidates and then narrow the candidate links back down to Sedna alone with orbit determination I think I will have built a pretty useful tool for future studies.
Published: 2/29/2020