
Sedna Revisited: Filtering Candidate Tracks with Orbit Determination
To recap my original Sedna study: I detected Sedna in difference images by linking detections with pixel velocity vector clustering and then matching those linked detections (tracks) to Sedna's known position. I basically found Sedna by looking where Sedna was supposed to be. I used a 200x200 pixel crop of a TESS full frame (2400x2400) image centered on Sedna; I constrained my linking algorithm to search over detections with daily pixel motion in the range of Sedna's. And then I matched that singular, highly constrained linked detection set to the expected position of Sedna for confirmation. The two difference image sets below show my linked detection (image set 1) and Sedna's expected position (image set 2) from that work.



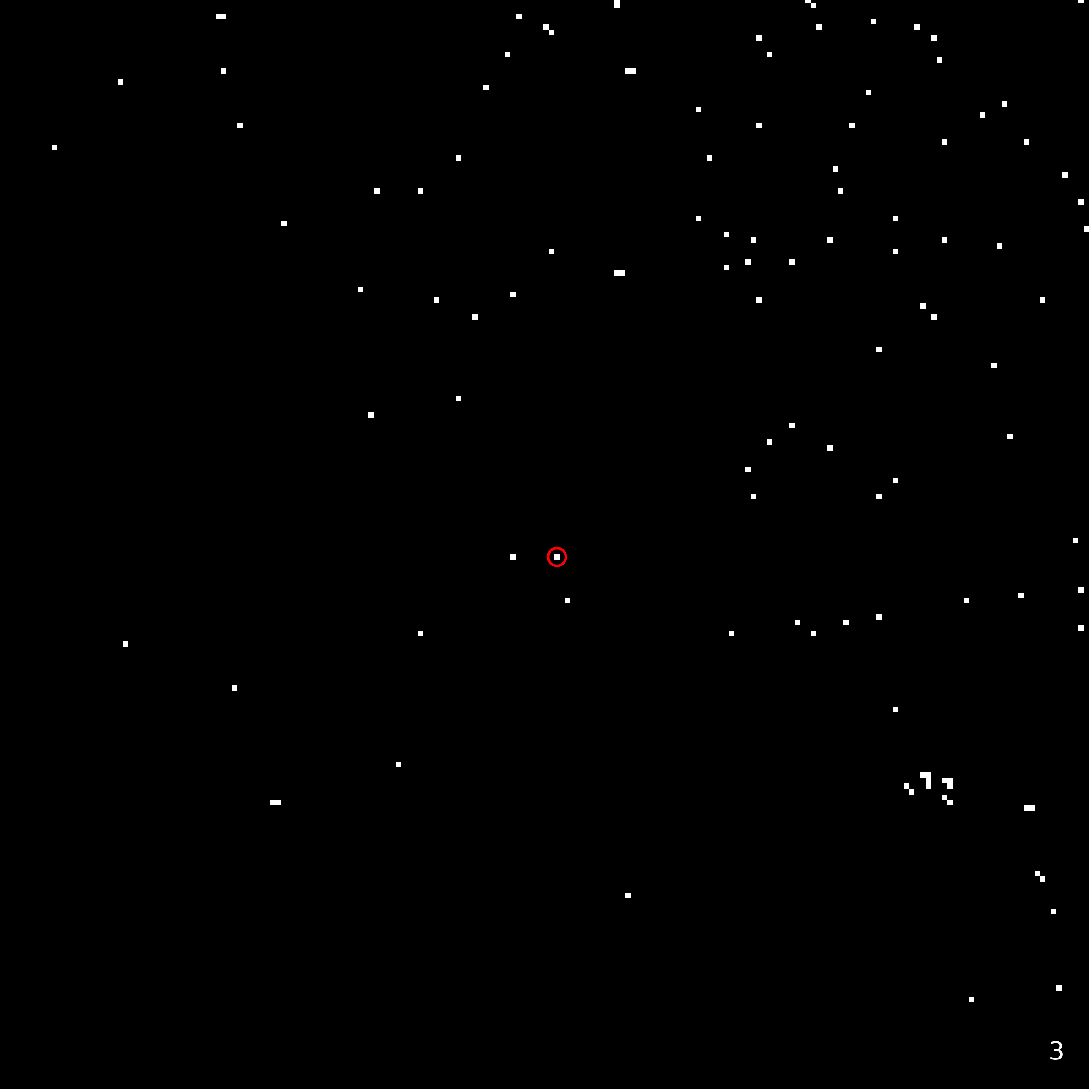



1. Detections linked by pixel velocity vector clustering from prior Sedna study.







2. JPL Horizon's expected position for Sedna from prior study.
Broadening the search and finding Sedna again
I'd like to detect Sedna again without using as much prior knowledge. Instead of a 200x200 pixel crop of a TESS full frame image I'll be using a 600x600 crop. And instead of constraining my linking algorithm to search only Sedna-like motion I'm going to broaden the search criteria to find a bunch of extra candidate tracks. Finally I'm going to use orbit determination to filter those tracks to recover Sedna once again. This last step is the crux of the effort as orbit determination should discard the majority of non-physical candidate tracks.
Since this process uses largely the same data and code as my prior Sedna work up to and including calculating the difference images, I'm going to skip over the part of this write-up that documents everything prior to linking. If you want a reminder of how things work before the linking takes place, see my initial Sedna detection.
Linking more detections and then filtering them with Orbit Determination
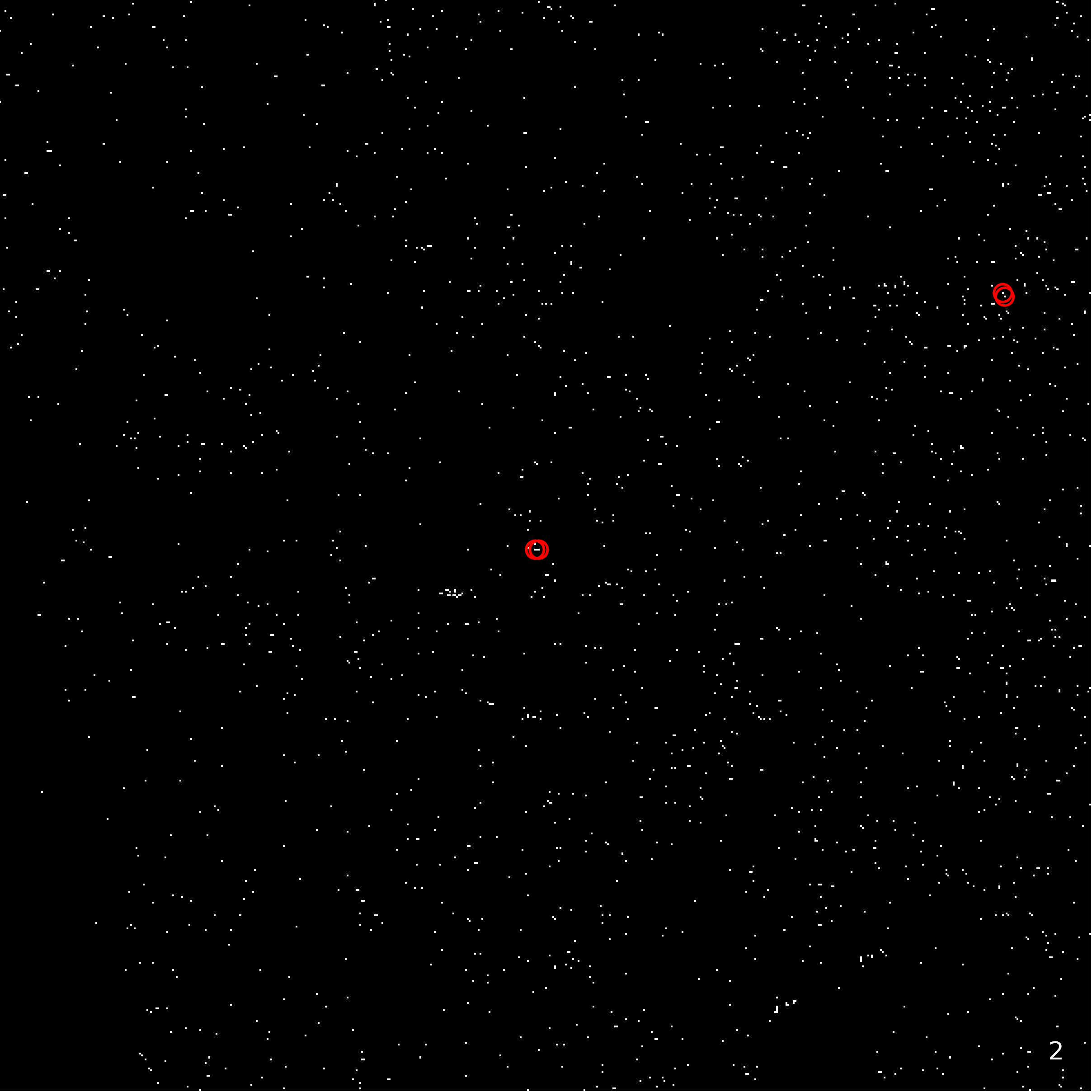
The starting point for this analysis is the same set of 6 difference images that correspond to the frames above. But these difference images are calculated over a 600x600 pixel area as opposed to the 200x200 area above. I then take the detections (any white dot) in the difference images and figure out what other detections it might link to. Specifically, I look for detections that are moving at 0.1 to 3 pixels per day with respect to one another with a 5% tolerance. Image set 3 shows the accumulating detections and linked detections over 6 frames. These circled detections represent objects moving at comparable velocities with respect to one another.
This search yields 113 combinations of position and time triplets. You might think that there are fewer than 113 red circles in image set 3, and you'd be correct. Some sets of links consist of 3 detections and some of 4 or 5. I generated 113 tracks by finding all the 3 tracklet combinations of the 81 circled detections that share a common tracklet. A minimum of 3 tracklets are required to do orbit determination. Upon running orbit determination with OpenOrb, 3 of these 113 candidate tracks solve and are shown in image set 4. The MPC ephemerides for these solved tracks are shown at the end of this analysis.







3. This is an accumulating set of difference images with linkable detections circled in red.


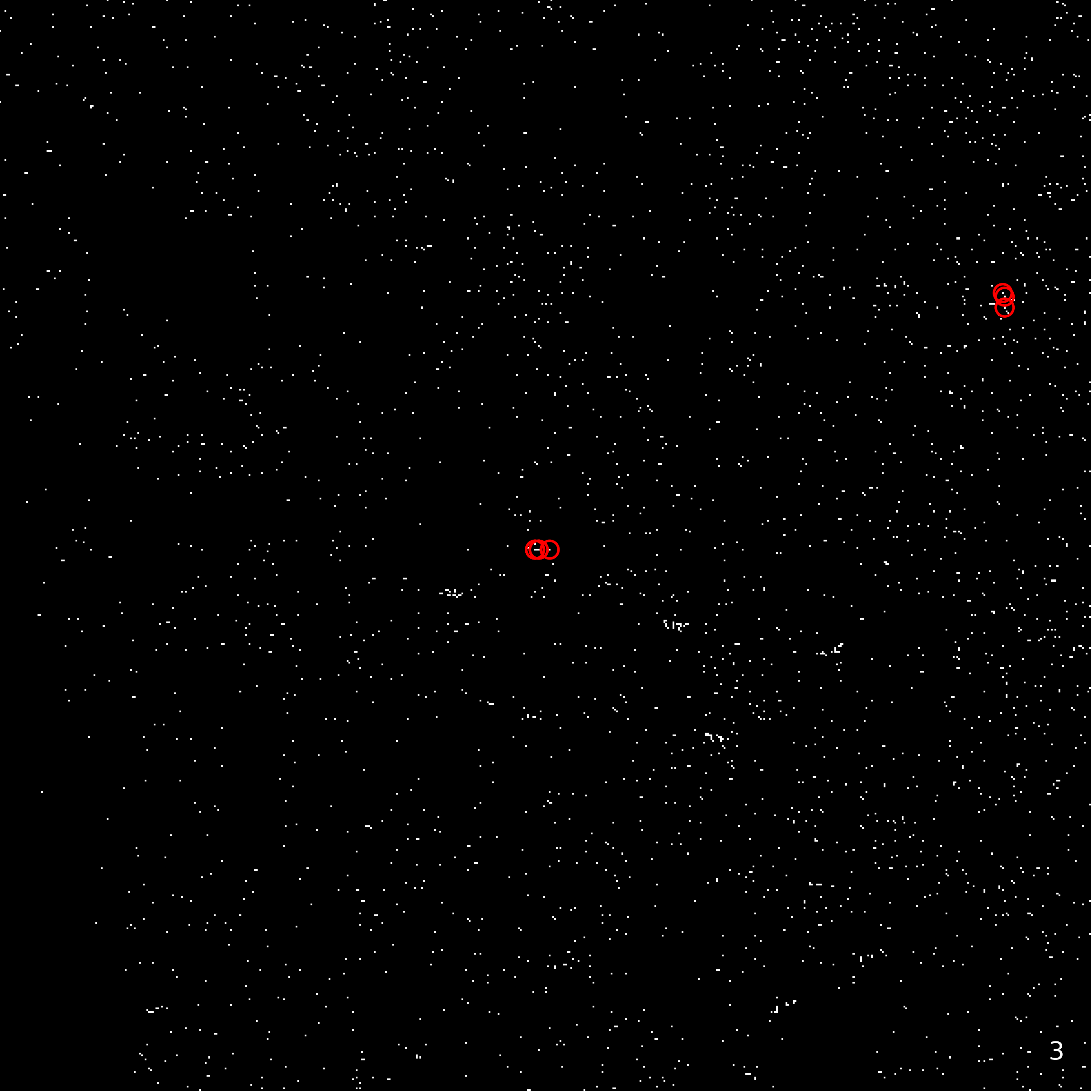



4. This image set is the same as image set 3 except only the linkable detections that solve with orbit determination remain. The solved tracks in the center of the image are actually two tracks with overlapping tracklets.
Can we identify these OD solved objects?
I didn't actually expect anything other than Sedna to solve here. I don't know what the object on the right in image set 4 is. Image 5 (below) shows the residuals of a least squares fit of the 4 tracks that solve with OpenOrb. The residuals I'm noting in that image are the residuals from a least squares straight line fit of the pixel locations of the solved tracks - not any kind of OD residual.
To try to figure out if these detections are real or not I pulled data from ISPY. ISPY is like Horizons (both are JPL tools), but it returns all objects within a field at a given time rather than a singular object over time. This is very useful for determining which objects you've detected in a wide field. Image set 6 shows the ISPY positions of apparent magnitude objects between 20 and 21. Green circles represent known object positions at the frame time (all detections were present in frame 2, so that's the one I used). You can see that Sedna is confirmed as the object in tracks 1 and 2, but the other object is not known. No, I don't think I've discovered anything here; I think I've just learned that OD is not sufficient to filter ALL non-physical candidate tracks. By the way, I'm only showing 20th to 21st magnitude objects in image 6 in order to reduce the number of green circles in the image. I checked everything brighter than 25th apparent magnitude and there were still no matches.

5. A composite image of all frames with orbit determination filtered tracks. I've also fit a straight line to each track to illustrate how linear the detections are. The residual is a pixel distance measure from the straight line fit.

6. Frame 2 with ISPY known object locations in green. My detections in red. Sedna is noted twice because this detection in frame 2 is a component of both track 1 and 2.
What to make of these unknown detections
I'm not sure about this part yet. Like I said, I don't think these detections are real. I think they're fortuitously arranged noise basically. My first impulse is to submit them to the Minor Planet Center and have them reject them, but that's pretty lazy. I need to consider other means to reject these "solutions." I do wonder if my Sedna ephemerides (in MPC format below) are of high enough precision to be submissible though. I'll probably be investigating that next. Below are the MPC ephemerides for Sedna and the unknown solved track.
Non-Sedna MPC ephemerides (Track 0):
T514016 C2018 11 17.16243 03 42 15.85 +08 08 39.3 20.1 i C57
T514016 C2018 11 18.03743 03 42 15.01 +08 07 55.1 20.3 i C57
T514016 C2018 11 21.37078 03 42 16.38 +08 05 54.8 20.2 i C57
Sedna's MPC ephemerides (Track 1):
90377 C2018 11 17.09993 03 48 25.60 +07 38 52.8 20.4 i C57 90377 C2018 11 18.03743 03 48 22.95 +07 38 44.5 20.4 i C57 90377 C2018 11 21.03744 03 48 15.02 +07 38 19.9 20.4 i C57
Sedna's MPC ephemerides (Track 2):
90377 C2018 11 17.09993 03 48 25.60 +07 38 52.8 20.4 i C57 90377 C2018 11 18.03743 03 48 22.95 +07 38 44.5 20.4 i C57 90377 C2018 12 01.14153 03 47 51.18 +07 37 06.3 20.5 i C57
Process notes:
- Maximum signal time for orbit determination: I didn't expect it would work, but my first attempt at getting OD to solve used the middle time of the difference image frame which derives from 20 full frame images spanning 10 hours. Using the median time from those 20 frames as the input to OD was not very precise and it didn't work. So what I actually did to get OD to solve was to pull all of the subframes that the difference image was built from, remove a background estimate from each of those and then extract the singular pixel intensity value at the position of the difference image detection. Finally I chose the observation time as the subframe observation with the maximum value at that pixel. That gave OpenOrb a much more precise observation time to solve with.
- Apparent magnitude estimation from ISPY data: Part of the process of building the MPC ephemerides is to estimate the apparent magnitude of the object you're observing. Because ISPY includes apparent magnitude measures of the objects it reports, I thought I'd try to use those values to estimate the apparent magnitude of the object I was observing. It worked well I think. JPL's reported apparent magnitude (TESS relative) for Sedna is 20.6. I calculated apparent magnitudes of 20.5 and 20.4 for Sedna at the observation time based on the median estimate from 270 objects that ISPY reported in the frame.
Ideas and next steps:
- How to reject orbit determination solutions that are likely false positives?: Maybe I can reject stuff with varying apparent magnitude? Can I use those least squares fit residuals in image set 5 to rule out non-linear tracks? Might overlapping 3 tracklet tracks that solve add evidence that the tracks are a real object?
- How good are the orbit determination solutions of known objects?: OpenOrb was able to solve the detections that match to Sedna, but it did not yield very accurate orbital elements. 3 position/time triplets are certainly not enough to do precise orbit determination though, so I'm not sure how much I need to worry about this. Even using 3 position/time triplets straight from Horizons doesn't yield an accurate orbit solution for Sedna.
- How about all those other objects in green circles in image set 6 that you failed to detect?: Good question. I'm guessing that most of those objects are moving more than 2 pixels per 10 hours in the images thus my median integration of 10 hours of data is probably filtering them from the final processed image. This would be a good study to undertake sometime though.
- Submit ephemerides to MPC: This is a goal but maybe not an immediate next step. I'm not sure yet if the Minor Planet Center will accept TESS data or if some entity has submitted the data for known objects already. I'm getting my results prepared for MPC submission the best I can regardless.
Discussion
This study helped me solve quite a few smallish technical challenges that I knew I needed to deal with eventually but that weren't a requirement for identifying objects in the studies I've done before. I knew I needed to estimate apparent magnitudes from observations. I knew I needed to build MPC ephemerides (using those apparent magnitude estimates). Most importantly, I knew that I needed to be able to test the physicality of a set of candidate detections without knowing what the object was in advance or pulling from a database of known objects. There's certainly some refinement work that I'll need to do with OD in the future, but I'm happy to have orbit determination as part of my process now. And I confirmed that I could detect Sedna in a wider field crop along the way; that's significant too.
I'm starting to see the search space that I could more broadly explore with the tools I've built: slow-moving, dim objects. I could call it Ben's slow & dim survey (ha). If TESS' single frame limiting magnitude is ~18 and I can see down to ~21 mag with stacking and image differencing, I could search for those objects that are distant enough to only travel a pixel or two over 20-24 hours of image integration by cropping full frame images and constraining my linker's search parameters to slow moving objects like I did in this study. And then with ISPY and orbit determination I can confirm whether an object is known or not. Sounds like a fun way to work through many, many more TESS full frame images.
Published: 4/30/2020; Updated: 5/16/2020